
10.0 ACCURACY OF COMPONENTS


In order to analyze the achievable accuracy from current state of the art MLS, we will briefly examine the measurement quantities that are required to generate a MLS point cloud. Then we will examine the individual error sources, which contribute to overall point cloud uncertainty, and finally we will provide typical overall point cloud accuracies that can be expected from today’s state of the art systems.
As discussed in the previous section, coordinates on the ground can be calculated by combining the information from the laser scanner, integrated GNSS/INS navigation system and calibration parameters. As a result, one must understand the individual accuracies of the laser scanner, navigation system, and overall system calibration in order to define the error budget for the overall system.
10.1 Typical size of error parameters
Equation 2 defines the relationship between all parameters that allow us to produce a georeferenced point cloud. We require the level of expected errors in each of the observations that determine the point cloud coordinates in order to estimate final point cloud accuracy. Therefore, we will examine and discuss typical error sizes for each group of observations. Unless otherwise specified, all error values quoted in this section are assumed to be normally distributed and estimated with a magnitude of one standard deviation.
10.2 IMU attitude errors
The inertial navigation component of the LIDAR system delivers the roll, pitch and heading angles that rotate the LIDAR observations from the local coordinate system of the vehicle into the mapping frame. Currently, the IMU components for LIDAR systems are available as COTS systems from a handful of different system manufacturers. As a result, it is fairly easy to determine typical accuracy specifications for the IMU subsystems by examining the manufacturer’s technical specifications. Table 6 lists typical post-processed IMU attitude accuracies for various systems. Note that in all cases these accuracies assume sufficiently accurate Differential GNSS (DGNSS) coverage to be able to reliably estimate the biases and drifts of the inertial sensors.
Table 6: Typical IMU Attitude Accuracy (1-s) Specifications
(Sources: http://www.novatel.com, http://www.applanix.com, www.igi.eu, www.oxts.com, www.ixblue.com)

10.3 Boresight errors
There are a variety of approaches to boresight angle (resulting from the misalignment between the laser scanner and IMU measurement axes) determination, but, in general, all of the approaches reduce to taking advantage of overlapping LIDAR strips, usually acquired by collecting data for the same area in both directions. Tie point and/or control point observations between overlapping LIDAR strips are collected, and then run through a least squares adjustment to determine the best fit boresight angles. Several approaches to boresighting are detailed in Skaloud and Lichti (2006), Morin (2002), Talaya et al. (2004) and Habib et al. (2011) for example. Using a least squares approach generates statistics on boresight angle accuracy, typically on the level of 0.001° in roll and pitch, and 0.004° in yaw are routinely observed (Morin, 2002, or Skaloud and Lichti, 2006).
10.4 Laser scanner errors
There are a number of factors that affect the accuracy with which the laser scanner subassembly is able to measure the angle and distance from the LIDAR system to the ground target. A detailed discussion of these error sources can be found in the literature, see Morin (2002), for example. For the purposes of our error analysis we will reduce the error sources to errors in distance and errors in angles. We make this reduction because most laser scanner manufacturers quote their expected accuracy in terms of these two macro error components and do not specify the individual factors that contribute to the overall error.
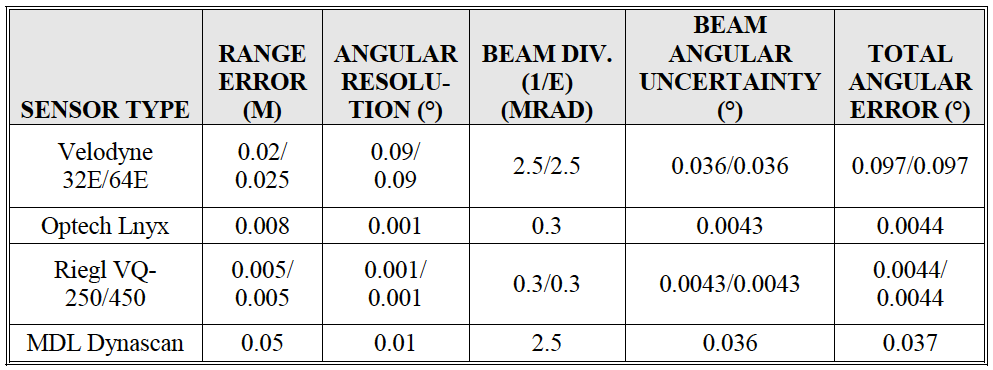
The error in distance is normally a function of the internal accuracy of the clock utilized to measure the time of flight of the laser pulse and the width of the output laser pulse energy. Angular measurement errors are generally the result of two error sources: (1), the angular resolution of the laser scanner angle encoder, and (2) uncertainty due to beam divergence. The first error source is straightforward; however, the second probably requires more discussion. The divergence (spreading) of the laser beam gives rise to uncertainty in location of the actual point of range measurement. The instrument will record the apparent position of the point along the emitted beam centerline; however, the actual return location is uncertain and could be anywhere within the beam footprint.
A good demonstration of this uncertainty is provided in Lichti and Gordon (2004), where they also demonstrate the anticipated level of uncertainty due to beam divergence can be quantified as (at a 1σ level) equal to one-quarter of the laser beam diameter in angular units. Table 7 lists typical ranging and angular measurement accuracies for a majority of the laser scanners currently used in mobile mapping platforms.
Table 7: Representative Laser Scanner Range and Angle Accuracy Specifications (1-s, sources: www.optech.ca, www.riegl.com, www.velodyne.com/lidar, www.mdl.co.uk – All accessed 05/10/2012)
10.4.1 Lever-arm offset errors
It is quite evident that the center of observations from the laser scanner, and the origin of the navigation subsystems cannot be co-located (Figure 8). Therefore, the precise, 3D offset or lever-arm between the two centers must be known in order to accurately geo-reference the laser scanner measurements. Since the physical measurement origin of the navigation system or laser scanner assembly cannot be directly observed, the lever-arm offset must be obtained indirectly.
There are two common methods of obtaining these offsets. The first employs a calibration procedure (i.e., making measurements of known points) to determine, among other parameters, the lever-arm offset of the laser scanner. In practice, however, the lever-arm components are difficult to observe due to their high correlation with other error sources within the system (specifically boresight values, DGPS errors, and IMU to GPS lever arm errors). The second method of offset determination is by a combination of physical measurement (using a tape measure) and use of the engineering drawing supplied for the IMU and laser scanner. Obviously, the second method is much simpler to implement, and is therefore used in a majority of cases. However, this approach too has its sources of error, because it assumes that the IMU and laser scan axes are aligned, and that the drawings accurately represent the origin of the subassemblies. Therefore, as a conservative estimate, one can assume the lever arm offset can be measured with an accuracy of 0.5 centimeters in all three components. It is also assumed that the IMU and laser have been rigidly mounted to a common frame so that no differential motion between their measurement origins can occur during data capture.

Figure 8: Lever arm offsets to mobile LIDAR components.
10.5 Positioning errors
The absolute, expected level of DGPS kinematic positioning errors for a LIDAR survey can be difficult to quantify. In general, there are a number of factors that have a direct impact on the resultant positioning accuracy of the DGPS subsystem. These factors, such as atmospheric errors, multipath, poor satellite geometry, baseline length, and loss of lock, are difficult to predict and therefore do not lend themselves to a generic error model. A good rule of thumb for relative DGPS kinematic positioning (Raquet (1998), Bruton (2000)) is that the positioning accuracy for relatively short (< 18.5 miles, 30 km) kinematic baselines is on the order of 0.033 ft (1 cm) + 1 PPM horizontally, and 0.065 ft (2 cm) + 1 PPM vertically. This accuracy level assumes no loss of lock of GPS signals, good satellite geometry, minimal multipath, and low ionospheric activity. Obviously, applying a generic accuracy level to the ground based system is even harder due to the frequent expected masking of GPS signals, by buildings, vegetation and other line of sight obstructions. For an excellent discussion on DGPS error sources, the reader is referred to Hofmann-Wellenhof, et al. (2008). In addition, Bruton (2000) also provides a detailed examination of DGPS error sources for precise airborne positioning.
10.6 Overall system accuracy
In order to examine the range of accuracy that can be accomplished theoretically by each of these systems, in the absence of local transformations to ground control, a rigorous error analysis was carried out for both a high accuracy system (high-end laser scanner and IMU – labeled as survey grade), and a lower accuracy system (lower accuracy laser and mid-grade IMU – labeled as mapping grade), using the methodology discussed in Glennie (2007b). The results of this analysis are displayed below in Figure 9. It should be noted that the expected errors in Figure 9 assume optimal laser scanning conditions – i.e., excellent GNSS solution quality, a properly calibrated laser scanning system, and orthogonal incidence.
